 Y (와이) - Δ (델타) 결선
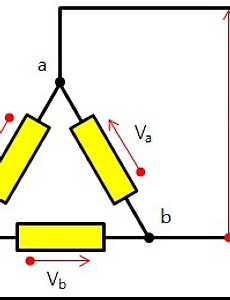
Y-Δ 회로 변환 위와 같은 Y - Δ회로에서 Y회로를 Δ 회로로 변환하는 식은 다음과 같다. Δ 회로를 Y 회로로 변환하는 식은 다음과 같다. 여기에서 R1과 RC는 서로 반대에 위치하고 있다. 델타 저항이 RD(=R1=R2=R3)로 동일하다면 Y 저항은 다음의 식과 같이 델타 저항의 1/3이다. RY = RD/ 3 Δ (델타) 결선의 상전압과 선전압 Δ (델타) 결선의 상전압 Va,Vb,Vc와 선전압 Vab,Vbc,Vca는 다음 그림과 같이 동일하다. 델타 결선의 상전압 Va,Vb,Vc는 선로의 상전압 Ea,Eb,Ec와 다르다. c 부분을 접지한다면 선로의 상전압 Ea,Eb,Ec는 다음과 같다. 델타 결선에서 접지를 하지 않고 3상이 평형이라면 가상의 중성점을 기준으로 한 선로의 상전압은 다음과 같다..
2018. 9. 25.
Y (와이) - Δ (델타) 결선
Y-Δ 회로 변환 위와 같은 Y - Δ회로에서 Y회로를 Δ 회로로 변환하는 식은 다음과 같다. Δ 회로를 Y 회로로 변환하는 식은 다음과 같다. 여기에서 R1과 RC는 서로 반대에 위치하고 있다. 델타 저항이 RD(=R1=R2=R3)로 동일하다면 Y 저항은 다음의 식과 같이 델타 저항의 1/3이다. RY = RD/ 3 Δ (델타) 결선의 상전압과 선전압 Δ (델타) 결선의 상전압 Va,Vb,Vc와 선전압 Vab,Vbc,Vca는 다음 그림과 같이 동일하다. 델타 결선의 상전압 Va,Vb,Vc는 선로의 상전압 Ea,Eb,Ec와 다르다. c 부분을 접지한다면 선로의 상전압 Ea,Eb,Ec는 다음과 같다. 델타 결선에서 접지를 하지 않고 3상이 평형이라면 가상의 중성점을 기준으로 한 선로의 상전압은 다음과 같다..
2018. 9. 25.
반자성체 종류
반자성 (Diamagnetism)은 자석을 반자성 물질에 접근 시키면 자석을 밀어 내는 것을 의미한다. 대부분의 물질은 약한 반자성을 지니고 있다. 납, 수은, 구리, 흑연, 다이아몬드, 금, 은, 비스무스, 물 등 대부분의 물질은 반자성을 띈다. 가장 강한 반자성을 지니는 물질은 초전도체 이다. 강한 반자성을 띄는 물질인 비스무스 (Bismuth)는 다음 동영상에서 확인할 수 있다. ☞ 강자성체, 반자성체, 상자성체
2018. 9. 24.
Ada 언어 용도와 장단점
Ada (에이다)Ada는 1977-1983년에 미 국방성의 요구로 CII Honeywell Bull에서 만들어진 프로그래밍 언어 이다. 현재 버전인 Ada 2012은 ISO/IEC 8652:2012로 표준화 되었다. Ada는 모듈화, 런타임 검사, 병렬 처리, 메세지 처리, 예외 처리 등의 특성을 가지는 프로그래밍 언어이다. Ada는 안전이 매우 중요한 미사일 유도 장치, 우주선 항법 장치, 비행기 시스템, 인공 위성, 기차 제어, 은행 등에 사용된다. Hello World -- Ada Hello, World! program. with Text_IO; use Text_IO; procedure Hello is begin Put_Line("Hello, World!"); end Hello;
2018. 9. 22.