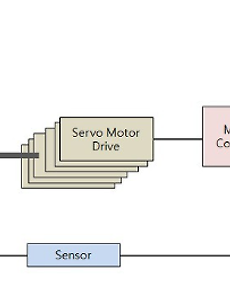
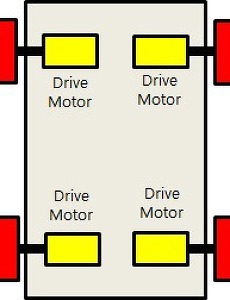
반응형 전자/로봇13 로봇 컨트롤러의 구조 로봇 컨트롤러를 구성하는 주요 요소는 모터를 제어하는 서보 드라이브와 모션 컨트롤러이다. 2023. 4. 17. 마이크로 마우스 마이크로 마우스 대회는 70년대 말부터 생기기 시작했다. 초기에는 마우스의 크기가 크고 속도도 느렸지만 최근에 사용되는 마이크로 마우스는 크기도 작고 속도도 매우 빠르다. 최근의 마이크로 마우스는 3m/s 이상의 속도로 움직이고 가감속이 10 m/s2 이상이고 코너에서 회전할 때는 2g의 원심력을 가진다. 팬을 이용하여 다운포스를 발생시키는 마우스는 2.5g의 가속력과 6g의 원심력을 발생시킨다. 스텝 모터에 비해 DC 모터는 무게와 부피가 작기 때문에 마우스를 더 빠르게 이동 시킬 수 있다. 하지만, DC 모터를 제어하기 위해서는 인코더를 설치하여 회전량을 피드백 받아야 한다. 마우스에는 기본적으로 미로의 벽을 감지하는 적외선 센서를 다수 사용하고 추가로 가속도 센서를 사용하기도 한다. ☞ 미로 탐색 .. 2018. 10. 23. 로봇 기업 Adept Technology 어뎁트(Adept Technology)는 1983년 미국에서 설립된 로봇 기업이다. 2015년 Omron에 인수되어 Omron Adept Technology로 사명을 변경하였다. 어뎁트의 로봇은 V+라는 자체 운영체제를 사용한다. 2018. 9. 27. 2축 로봇 암의 자코비안 행렬 2축 로봇 암의 Forward Kinematics 식은 다음과 같다. 위 식의 자코비안 행렬은 다음과 같다. 여기서, 2018. 9. 27. 2축 로봇 암의 기구학 식 2축 로봇 암의 기구학 (Forward Kinematics) 식은 다음과 같다. ☞ 모바일 로봇 기구학 2018. 9. 26. 모바일 로봇 구동방식과 운동 방정식 모바일 로봇의 구동방식 모바일 로봇의 모터는 크게 구동 모터와 방향 전환을 위한 스티어링 모터로 구성된다. 다음 그림은 4WD (4 Wheel Drive)로 좌우 모터의 회전 방향을 변경하여 모바일 로봇의 방향을 전환한다. 다음 그림은 뒷 바퀴의 좌우에 구동 모터를 설치하고 앞 바퀴에는 캐스터를 설치한 방식이다. 뒷 바퀴의 좌우 모터의 회전 방향을 변경하여 모바일 로봇의 방향을 전환한다. 다음 그림은 앞 바퀴에 구동 모터와 스티어링 모터를 함께 설치하는 방식이다. 스티어링 모터를 사용하여 방향 전환을 가장 정밀하게 할 수 있다. 다음 그림은 뒷 바퀴에 구동 모터를 설치하고 앞 바퀴에 스티어링 모터를 설치한 방식이다. 자동차와 같은 방식이다. 모바일 로봇의 운동 방정식 2개의 바퀴로 구동 되는 Differ.. 2018. 9. 23. 로봇의 좌표변환 평면 좌표에서 로봇의 좌표계 0과 좌표계 1 사이의 변환은 다음과 같다. 2018. 9. 12. 사다리꼴 속도 프로파일 함수 사다리꼴 속도 프로파일(Trapezoidal Velocity Profile)은 다음 그림과 같다. 0~t1에서는 가속도 a1으로 가속하고 t2~t3에서는 가속도 a2으로 감속한다. 위 그래프의 거리 d 함수는 다음 식과 같다. 0~t1와 t2~t3에서는 2차 함수이고 t1~t2에서는 1차 함수이다. ☞ 속도 프로파일 2018. 5. 29. SCARA 로봇 개요 SCARA (Selective Compliance Assembly Robot Arm, Selective Compliance Articulated Robot Arm)은 1981년 일본의 세이코, 펜텔, NEC에서 발표한 로봇으로 야마나시 대학의 히로시 마키노 교수가 개발하였다. SCARA 로봇에서 Selective Compliance이 의미하는 것은 선택적으로 컴플라이언스가 있다는 뜻으로 컴플라이언스는 강성에 반비례하는 물리량이다. SCARA 로봇의 Z 축 방향의 강성이 높지만 XY 축 방향은 상대적으로 강성이 약하기 때문에 Selective Compliance라는 말을 사용했다. SCARA 로봇은 다음 그림과 같이 4 축으로 구성된다. J1, J2, J4는 회전하고 J3은 선형 이동한다. Z 축을 따라 .. 2018. 5. 25. 모바일 로봇 소스 코드 2018. 3. 7. 로봇 원격 제어 프로그램 PC에서 원격으로 로봇을 제어하는 프로그램 -90 ~ 90도 방향을 전환하며 초음파 거리센서로 측정한 거리를 표시한다. 2018. 2. 22. 로봇 컨트롤러 회로도 2018. 2. 22. 모바일 로봇 탱크형 모바일 로봇의 전체 구조는 다음 사진과 같다. 로봇 내부에 있는 컨트롤러 보드에서 DC 모터 2개와 RC용 서보모터와 초음파 거리센서를 제어한다. DC 모터는 로봇 구동에 사용되고 RC용 서보모터는 초음파 거리센서의 방향을 -90 ~ 90도 범위로 전환시키며 초음파 거리센서는 전방 물체를 감지한다. PC에서는 컨트롤러 보드와 통신으로 연결되어 제어 명령을 로봇에 전송하고 로봇의 센서 정보를 수신하여 모니터 화면에 표시한다. 2018. 2. 21. 이전 1 다음 반응형